NaviX
GPS-free visual navigation for UAVs. Determines drone position by matching camera imagery to satellite maps — no external signals required. 20–30m accuracy on a Raspberry Pi 5.
Based on NaviLoc research →How to use
At home or anywhere with internet, connect to the drone’s web interface. Choose a point on the map, set the coverage radius, and fetch the satellite data. For a 10 km² area, preparation takes under 2 minutes.
Once the drone takes off, NaviX automatically uses the prepared data to localize it in real time. At altitudes between 100–1000m, the system continuously matches what the camera sees against the satellite map to determine the drone’s true position.
NaviX corrects the drone’s position estimate by nudging it back to where GPS says it should be — except it does this without GPS. The result is high-precision navigation at any mission scale, even in full GPS denial.
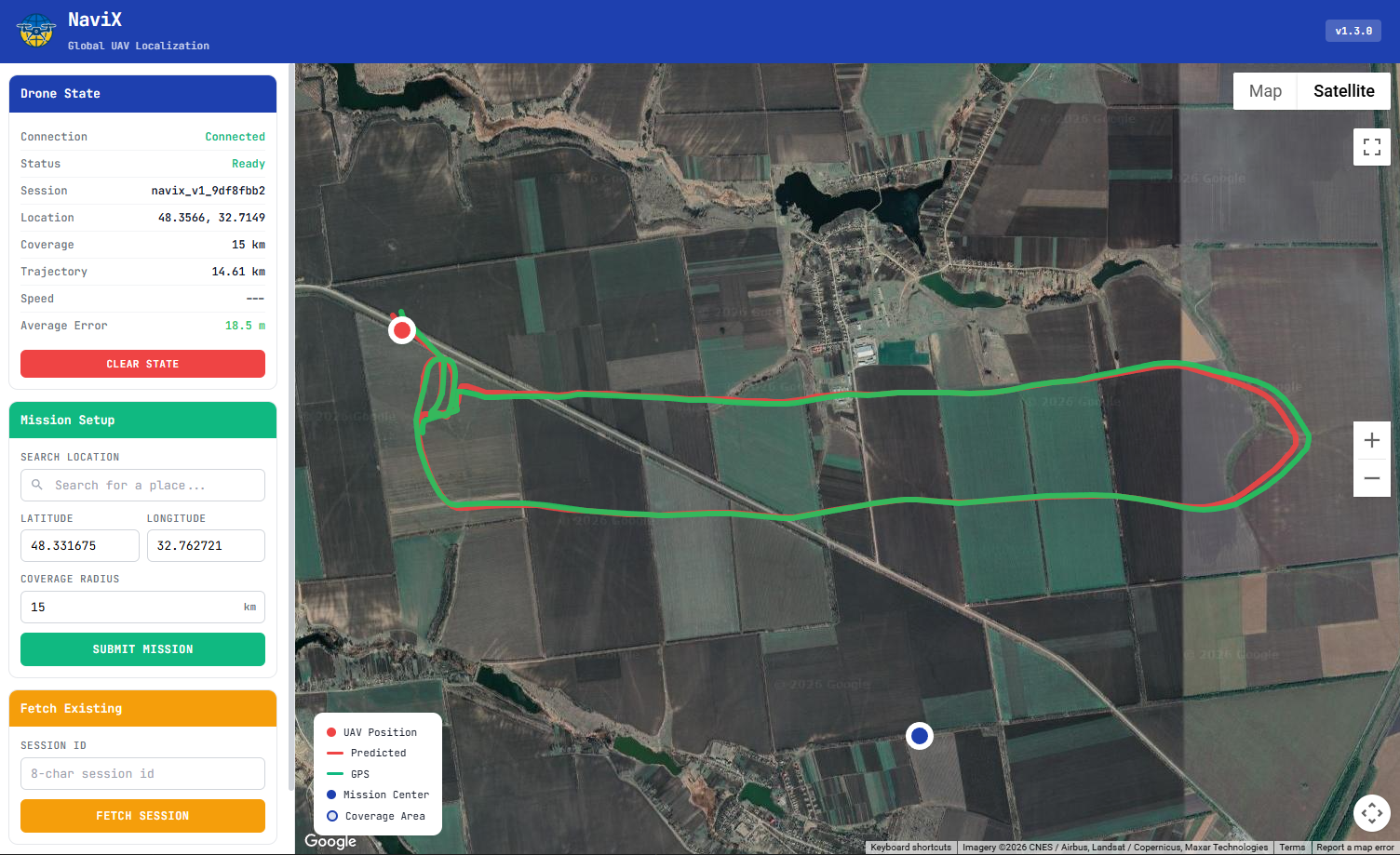
NaviX interface displaying corrected drone position on the satellite map
Specifications
Performance
Integration
Join the NaviX Waitlist
NaviX is in closed testing with select partners. Request early access.